Roboter in der Medizin – das sind nicht nur die Da-Vinci-Operationssysteme. Das Spektrum reicht von handgehaltenen Fräsen mit optischem Tracking über Laborautomaten bis hin zu Exoskeletten für die Rehabilitation.
Das Thema ist aktuell: Zentrale Patente laufen aus und öffnen den Markt für neue Anbieter. Gleichzeitig ermöglichen KI-Technologien völlig neue Produktkategorien und senken Markteintrittsbarrieren. Die Kombination schafft ein historisches Zeitfenster für neue Marktteilnehmer.
Die Kehrseite: Wer in diesen Markt einsteigt, steht vor einer regulatorischen Landschaft, die komplexer ist als bei „klassischen“ Medizinprodukten. Daher wird regulatorische Kompetenz zum entscheidenden Wettbewerbsvorteil.
Dieser Artikel gibt Orientierung.
1. Welche Roboter und robotischen Systeme gibt es in der Medizintechnik?
a. Warum Robotik weit mehr ist als humanoide Maschinen
Wenn Hersteller an „Robotik in der Medizin“ denken, haben die meisten ein Da-Vinci-System vor Augen: ein großer Roboter, der chirurgische Instrumente steuert. Die Realität ist breiter – und viele Hersteller realisieren nicht, dass ihr Produkt bereits in den Bereich der Robotik fällt.
Das Spektrum umfasst mindestens:
- Chirurgische Assistenzsysteme (von der Tele-Operation bis zum handgehaltenen Werkzeug mit Tracking)
- Rehabilitations- und Therapie-Robotik (Exoskelette, Gangtrainer)
- Laborautomaten und Pipettierroboter (IVD-Bereich)
- Pflege- und Servicerobotik (Transport, Assistenz)
- Prothetik mit Aktorik (bionische Prothesen)
- Autonome Transportsysteme im Krankenhaus
All diese Systeme verbindet, dass sie über Sensorik, Aktorik und eine Software-gesteuerte Regelung verfügen, die auf Basis von Eingangsdaten physisch in die Umgebung eingreift. Was sie unterscheidet, ist ihr Autonomiegrad – von vollständig ferngesteuert bis autonom agierend.
Einen vertiefenden Blick auf autonome Systeme in der Medizintechnik finden Sie in unserem Artikel zu autonomen Systemen.
b. Drei Typen chirurgischer Roboter
Gerade im chirurgischen Bereich lohnt sich ein genauer Blick, denn hier zeigt sich exemplarisch, wie unterschiedlich Roboter sein können:
Typ 1: Tele-Operation (Master-Slave)
Bei Systemen wie dem da Vinci von Intuitive Surgical sind Steuerung und Aktor vollständig voneinander getrennt. Die Chirurgen sitzen an einer Konsole und steuern Instrumente, die am Patienten agieren – potenziell auch aus einem anderen Raum heraus.
Die Vorteile sind erheblich: Das System kann die „groben“ Bewegungen der Chirurgen in wesentlich feinere Bewegungen der Instrumente skalieren. Es kann den physiologischen Tremor von Operateuren herausfiltern und sogar Überlagerungen mit Körperbewegungen wie dem Herzschlag kompensieren.
Allerdings hat die Trennung vom Operationsfeld (dem sogenannten Situs) auch Nachteile: Die Operateure sehen nicht den ganzen Patienten. Der direkte Austausch mit dem Team – insbesondere dem Anästhesisten – wird erschwert. Und das System muss jederzeit sicherstellen, dass die Koordinatensysteme der Konsole und des Operationsfelds exakt übereinstimmen. Ein Fehlabgleich wäre ein schwerwiegendes Sicherheitsrisiko.
Typ 2: Kollaborative Roboter (Co-Bots)
Bei Co-Bots wie dem MAKO-System von Stryker behalten die Chirurgen das Werkzeug in der Hand, während der Roboter in seine Bewegungen eingreift – vergleichbar mit einem Spurhalte-Assistenten im Auto. Der Roboter kann sensibles Gewebe schützen, die Operateure innerhalb einer definierten Region halten oder bei der Feinpositionierung helfen, beispielsweise beim Fräsen eines Implantatsitzes.
Anders als bei der Tele-Operation gibt es hier keine Skalierung der Bewegungen. Stattdessen bleibt die direkte Verbindung zwischen dem Menschen und dem Werkzeug erhalten.
Ein Risiko, das wir in der Praxis beobachten: Forschungsinstitute nutzen häufig Industrieroboter, um Co-Bots zu implementieren. Diese sind jedoch nicht auf die Kinematik eines OP-Setups ausgelegt, bieten oft keine inhärente Sicherheit im Design und sind weder für die Reinigung noch für die Sterilitätsanforderungen im OP optimiert. Der Schritt vom Forschungsprototyp zum Medizinprodukt ist dann besonders groß.
Typ 3: Handgehaltene Systeme mit Tracking
Der dritte Typ lässt sich mit einer Bohrmaschine vergleichen, die über ein optisches Tracking-System verfügt. Die Chirurgen übernehmen die Grobpositionierung, das System nimmt anhand von Planungsdaten die Feinpositionierung vor. Das ist beispielsweise bei Retina-Operationen oder beim Fräsen von Knie-Implantatsitzen hilfreich.
Der entscheidende Unterschied: Der Mensch kann jederzeit vollständig eingreifen und das Werkzeug aus dem OP-Feld zurückziehen. Der Autonomiegrad ist damit am höchsten – aber die Unterstützung bei der Präzision ist erheblich.
c. Warum Roboter gerade in der Laparoskopie unverzichtbar werden
Die Chirurgie setzt Roboter heute vor allem in der Laparoskopie ein – also bei minimalinvasiven Eingriffen im Weichgewebe. Weniger verbreitet sind sie bislang in der Neurochirurgie oder Orthopädie.
Warum gerade die Laparoskopie? Weil sie ohne Roboterunterstützung extreme kognitive Anforderungen an das operierende Personal stellt:
- Die Übersetzung zwischen Handbewegung und Werkzeugbewegung ist abhängig von der Eindringtiefe des Instruments in den Körper.
- Das Werkzeug bewegt sich gegenläufig zur Handbewegung (Hebeleffekt am Zugangspunkt).
- Die Kamera zeigt eine davon abweichende Orientierung.
Die Operateure müssen also ständig drei verschiedene Richtungs- und Übersetzungsverhältnisse mental kompensieren. Roboterunterstützung kann diese kognitive Last drastisch reduzieren, indem sie die Übersetzung automatisch kompensiert und eine intuitive Steuerung ermöglicht.
2. Roboter: Die regulatorische Einordnung ist entscheidend
a. Definition „(medizinischer) Roboter“
programmierter, aktuierter Mechanismus mit einem Grad an Autonomie, der sich in seiner Umgebung bewegt, um vorgesehene Aufgaben auszuführen. Wesentlich ist dabei: Ein Roboter umfasst immer ein Kontrollsystem.
Quelle: ISO 8373:2021
Für den medizinischen Kontext präzisiert die IEC 80601-2-77 den Begriff des Robotically Assisted Surgical Equipment (RASE): ein medizinisches elektrisches System, das angetriebene Aktorik zur Manipulation chirurgischer Instrumente bereitstellt und ein Kontrollsystem enthält, das auf Basis von Sensorinformationen Befehle verarbeiten und/oder erzeugen kann.
Drei Kernelemente verbinden beide Definitionen:
- Aktorik, die physisch in die Umgebung eingreift
- Ein programmierbares Kontrollsystem, das die Aktorik steuert
- Ein Grad an Autonomie – Das System trifft zumindest Teilentscheidungen eigenständig.
Die Sensorik-basierte Rückkopplung (geschlossener Regelkreis) ist in der allgemeinen Definition nicht zwingend, in der medizinischen Praxis aber der Regelfall – und wird durch die Sicherheitsanforderungen der IEC 80601-2-77 für chirurgische Roboter de facto vorausgesetzt.
Nicht jedes aktive Medizinprodukt ist ein Roboter. Eine Infusionspumpe hat Aktorik und ein Kontrollsystem – aber keinen relevanten Grad an Autonomie. Umgekehrt ist nicht jedes autonome System ein Roboter: Eine KI-Software, die eigenständig Diagnosen stellt, ist autonom, hat aber keine Aktorik.
b. Entscheidungsbaum
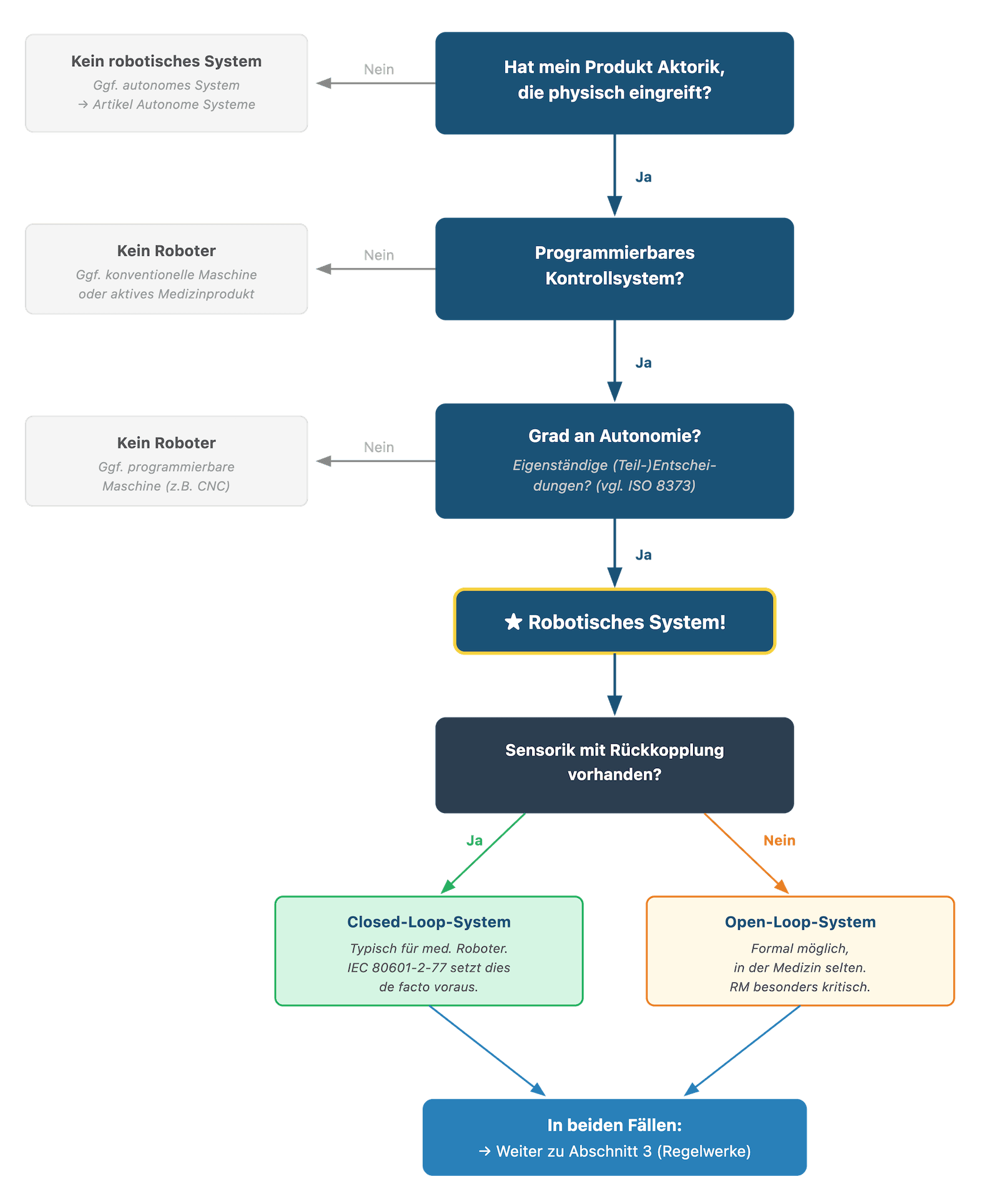
Nicht jedes Produkt mit einem Motor ist ein Roboter. Aber die Grenze ist fließender, als viele Hersteller denken. Fragen Sie sich:
- Hat mein Produkt Aktorik, die physisch in die Umgebung eingreift (bewegt, fräst, greift, transportiert)?
- Verfügt es über Sensorik, die den Zustand der Umgebung erfasst (Kraft, Position, Bild, Gewebe)?
- Gibt es eine softwaregesteuerte Regelung, die auf Basis der Sensordaten die Aktorik steuert – also eine geschlossene Regelschleife?
- Wie hoch ist der Autonomiegrad? Trifft das System eigenständig Entscheidungen – und seien es nur Mikro-Entscheidungen, wie eine Kraft-Begrenzung?
Wer bei den ersten drei Fragen mit „Ja“ antwortet, hat mit hoher Wahrscheinlichkeit ein robotisches System (s. Abb. 1). Und damit verändert sich zweierlei:
- Sie stehen an der Kreuzung mehrerer Regelwerke gleichzeitig – mit roboterspezifischen Normen und anderen Klassifizierungspfaden (Abschnitt 3).
- Die konkreten Aktivitäten über den gesamten Lebenszyklus entscheiden sich qualitativ von denen klassischer Medizinprodukte – vom Risikomanagement über die Usability bis zur Post-Market Surveillance (Abschnitt 4).
3. Welche regulatorischen Anforderungen gelten?
a. Drei regulatorische Welten, die bei Robotern kollidieren
Was robotische Medizinprodukte regulatorisch besonders macht, ist die Überlagerung mehrerer Regelwerke, die jeweils für sich bereits komplex sind:
MDR (EU) 2017/745 bzw. IVDR (EU) 2017/746
- Jedes Medizinprodukt – auch ein robotisches – muss die grundlegenden Sicherheits- und Leistungsanforderungen der MDR erfüllen. Die Klassifizierung erfolgt nach den bekannten Regeln, wobei chirurgische Roboter aufgrund ihres invasiven Charakters und ihrer aktiven Energieabgabe typischerweise in Klasse IIb oder III fallen.
- Bei Laborautomaten im IVD-Bereich greift statt der MDR die IVDR – die Anforderungen sind strukturell sehr ähnlich, sodass die regulatorische Methodik übertragbar ist.
Maschinenverordnung (EU) 2023/1230
- Viele Roboter sind gleichzeitig Maschinen im Sinne der Maschinenverordnung: Sie verfügen über bewegte Teile, die durch ein anderes Antriebssystem als unmittelbare menschliche oder tierische Kraft bewegt werden. Das bedeutet eine zusätzliche Risikobeurteilung nach Maschinenverordnung und eine eigene CE-Konformitätsbewertung.
AI Act (EU) 2024/1689
- Sobald ein robotisches System KI-Komponenten enthält – sei es für Bildverarbeitung, Entscheidungsunterstützung oder autonome Steuerung – kommt der AI Act ins Spiel. KI-basierte Medizinprodukte der Klasse IIa oder höher gelten als Hochrisiko-KI-Systeme.
Allerdings hat die MDR derzeit Vorrang: Die Konformitätsbewertung erfolgt primär nach MDR, die spezifischen AI-Act-Pflichten greifen zeitversetzt.
b. Roboterspezifische Normen
Neben den „üblichen“ Normen für Medizinprodukte (IEC 60601-1, IEC 62304, ISO 14971) gibt es Normen, die spezifisch für robotische Systeme relevant sind:
IEC 80601-2-77 – Chirurgische Roboter
- Diese Partikularnorm der IEC 60601-Familie definiert spezifische Sicherheits- und Leistungsanforderungen für RASE (Robotically Assisted Surgical Equipment). Zentrale Anforderungen umfassen u. a.:
- Risikomanagement für jeden Bewegungsfreiheitsgrad des Roboters
- Kraft- und Geschwindigkeitsbegrenzung als Schutzmaßnahme
- Definierte Stopp-Funktionen (Not-Stopp, kontrollierter Stopp)
- Schutz vor unbeabsichtigter Bewegung
- Anforderungen an die Koordinatensystem-Registrierung zwischen Eingabe und Aktor
Der letzte Punkt ist in der Praxis besonders relevant: Bei Tele-Operationen muss der exakte Abgleich der Koordinatensysteme jederzeit gewährleistet sein – ein Thema, das in der IEC 60601-1 allein nicht direkt adressiert wird.
ISO 13482 – Persönliche Pflege-Roboter
- Definiert Sicherheitsanforderungen für Personal Care Robots in nicht-industriellen Umgebungen, insbesondere für Gefährdungen durch physischen Kontakt, Autonomie und Navigation.
Diese Norm ist ausdrücklich nicht für medizinische Anwendungen konzipiert. Sie kann jedoch als Referenz für die Gefährdungsanalyse herangezogen werden, insbesondere bei Pflege-Robotern, die an der Grenze zwischen Medizinprodukt und Consumer-Produkt stehen.
ISO 10218-1/-2 – Industrieroboter
- Sicherheitsanforderungen für Industrieroboter. Relevant, wenn Roboter-Komponenten aus dem industriellen Bereich verbaut werden – was gerade bei Co-Bot-Implementierungen in der Forschung häufig der Fall ist. Die 2025 neu gefasste Ausgabe berücksichtigt erstmals stärker kollaborative Szenarien.
ISO/TS 15066 – Kollaborative Roboter
- Definiert konkrete Kraft- und Druckgrenzwerte für den Mensch-Roboter-Kontakt. Diese Werte sind als Ausgangspunkt für die Risikobeurteilung auch bei medizinischen Co-Bots relevant, müssen aber für den klinischen Kontext (z. B. Kontakt mit offenem Gewebe statt mit Haut) angepasst werden.
IEC 62304 und IEC 62443
- Bei robotischen Systemen besonders relevant, weil diese typischerweise mehrere Software-Systeme gleichzeitig enthalten (Steuerung, Bildverarbeitung, KI, Benutzerschnittstelle, Sicherheitsüberwachung) und aufgrund ihrer Vernetzung und physischen Wirkfähigkeit besonders attraktive Cybersecurity-Ziele sind.
c. Besonderheiten in anderen Märkten
FDA (USA): Chirurgische Roboter werden in den USA typischerweise über den 510(k)-Pfad zugelassen, sofern ein geeignetes Prädikatsprodukt existiert. Für neuartige Systeme kommt der De-Novo-Pfad in Betracht.
Relevant, wenn auch nicht roboterspezifisch, ist die FDA-Guidance zu Computational Modeling and Simulation. Gerade bei Robotern ist der Weg zum digitalen Zwilling kurz, da diese Systeme in der Regel vollständig digital beschrieben sind. Simulation kann damit Teile der Verifizierung und Validierung übernehmen – ein erheblicher Vorteil bei Systemen, deren physische Testszenarien komplex und teuer sind.
Weitere Märkte wie China (NMPA) und Japan (PMDA) haben eigene Zulassungsanforderungen für Medizinprodukte, die auch für robotische Systeme gelten.
Eine detaillierte Betrachtung würde den Rahmen dieses Artikels sprengen – sprechen Sie uns an, wenn Sie für einen spezifischen Markt Unterstützung benötigen.
d. Zwischenfazit: Regulatorische Komplexität
Angesichts der regulatorischen Komplexität ergibt es oft Sinn, ein robotisches Gesamtsystem regulatorisch in mehrere Produkte aufzuteilen.
- Medizinprodukte
- Zubehör
- Nicht-Medizinprodukte
Diese Aufteilung hat massive Auswirkungen auf Aufwand, Kosten und Time-to-Market – und sie bestimmt, welche Normen für welche Komponente anzuwenden sind, welche Konformitätsbewertungsverfahren durchlaufen werden müssen sowie ob – und falls ja, welche – Behörden bzw. Benannten Stellen einzubeziehen sind.
Diese regulatorische Strategie steht idealerweise am Anfang jeder Entwicklung – nicht an deren Ende. Denn sie beeinflusst nicht nur die Zulassung, sondern den gesamten Lebenszyklus: vom Risikomanagement über die klinische Bewertung bis zur Post-Market Surveillance. Wie sich dieser Lebenszyklus bei robotischen Medizinprodukten konkret von dem der klassischen Medizinprodukte unterscheidet, zeigt Abschnitt 4.
Die Experts des Johner Instituts sind darauf spezialisiert, Hersteller von Medizinprodukten und IVD bei der regulatorischen Strategie zu unterstützen.
4. Unterschiede zwischen robotischen und „klassischen“ Medizinprodukten?
Wer die regulatorische Landschaft kennt (Abschnitt 3), weiß, welche Anforderungen gelten. Die mindestens ebenso wichtige Frage ist: Was bedeutet das konkret für den Entwicklungsalltag? Denn robotische Medizinprodukte unterscheiden sich über den gesamten Lebenszyklus qualitativ von klassischen Medizinprodukten.
a. Risikomanagement
Das Risikomanagement nach ISO 14971 gilt für jedes Medizinprodukt. Bei robotischen Systemen verändern sich jedoch die Risiken und Maßnahmen zur Risikobeherrschung:
- Autonomiegrade erzeugen neue Gefährdungskategorien. Ein System, das eigene (Mikro-)Entscheidungen trifft, verhält sich nicht mehr vollständig vorhersagbar. Das gilt auch für Co-Bots, die „nur“ in Bewegungen eingreifen.
- KI-spezifische Risiken kommen hinzu, wenn maschinelles Lernen eingesetzt wird: Bias, Drift, Opazität der Entscheidungsfindung; bei LLMs zusätzlich: Halluzination.
- Das Koordinatensystem-Problem: Ein Fehler im Abgleich zwischen Eingabe und Aktor ist ein roboterspezifisches Risiko, das bei keinem klassischen Medizinprodukt existiert.
- Kraft-, Moment- und Geschwindigkeitsbegrenzung sind zentrale Schutzmaßnahmen. Sie müssen für jeden Freiheitsgrad einzeln betrachtet werden.
- Mehrkanalige Systemarchitekturen werden wahrscheinlich notwendig – ein autonomer Kanal allein reicht für sicherheitskritische Entscheidungen nicht aus. Redundante Überwachung ist State of the Art.
b. State of the Art
Ein Thema, das bei robotischen Systemen unweigerlich auftaucht und das weit über die reine Technik hinausgeht: Was passiert, wenn der Roboter potenziell besser ist als der State of the Art, der Mensch?
Bei einer zeitkritischen Situation – etwa einer akuten Blutung während einer Operation – kann ein autonomes System unter Umständen schneller und präziser reagieren als ein Mensch. Muss dann ein „Human in the Loop“ sein – oder darf er es aus Sicherheitsgründen gerade nicht mehr sein?
Im Rahmen der Nutzen-Risiko-Bewertung nach MDR muss der Hersteller den State of the Art als Vergleichsmaßstab heranziehen. Wenn der State of the Art die menschliche Leistung ist, der Roboter diese aber übertrifft, entsteht eine regulatorische und ethische Grauzone: Der Hersteller muss argumentieren können, warum sein System sicher genug ist, um autonom zu handeln – oder er muss begründen, warum er trotz überlegener Systemleistung einen Menschen zwischenschaltet. Beides erfordert eine sorgfältige, dokumentierte Abwägung.
c. Usability
Der Autor dieses Artikels hat erforscht, wie chirurgische Roboter den Operateuren haptisches Feedback geben können. Dass er am Johner Institut im Bereich Usability Engineering arbeitet, ist kein Zufall: Bei robotischen Systemen sind Usability und Risikomanagement untrennbar verschränkt.
Ein konkretes Beispiel: Haptisches Feedback an einem chirurgischen Instrument kann zwei Funktionen gleichzeitig erfüllen:
- Information: Den Operateuren vermitteln, mit welchem Gewebe sie interagieren – z. B. ob sie gegen einen Knochen stoßen
- Steuerung: Die Operateure aktiv führen – z. B. sensibles Gewebe schützen, sie in einer definierten OP-Region halten oder dabei helfen, einen Implantatsitz präzise zu fräsen
Das Problem: Beide Funktionen nutzen denselben physischen Kanal – die Kraft-/Momentrückkopplung am Instrument. Wenn sich die Impulse überlagern, können sie einander auslöschen oder verfälschen. Die Operateure wissen dann nicht mehr, ob der Widerstand vom Gewebe herrührt oder von der Steuerungsassistenz.
Haptik hat dabei fundamentale Vorteile gegenüber visuellen Displays:
- Sie wirkt in drei Dimensionen direkt auf die Hand. Displays bleiben grundsätzlich zweidimensional – auch bei 3D-Darstellungen. Entsprechend sind Eingabegeräte an Displays ebenfalls meist zweidimensional.
- Dadurch, dass die Haptik im Hand-Auge-Koordinatensystem direkt wirkt, bedarf es keine Koordinatentransformation durch den Nutzer wie bei visuellen Displays.
- Reaktionszeiten auf haptische/taktile Reize bei Menschen sind kürzer als auf visuelle oder auditive Reize.
Dieses Beispiel illustriert, warum Usability-Tests bei robotischen Systemen qualitativ anders sind als bei klassischen Medizinprodukten: Die Interaktion hat mehr Freiheitsgrade, die Rückmeldungen des Systems sind komplexer und das Systemverhalten – gerade bei höheren Autonomiegraden – ist weniger vorhersagbar. Der Anwender muss das System nicht nur bedienen, sondern auch verstehen, wann er ihm vertrauen kann und wann nicht.
d. Klinische Bewertung und Prüfung
Wie bewertet man ein System klinisch, das teilautonom agiert? Bei robotischen Systemen hängt das klinische Ergebnis noch stärker als bei anderen Medizinprodukten von der Interaktion zwischen Mensch und Maschine ab – und diese Interaktion variiert je nach Können des operierenden Personals, nach Konfiguration und nach klinischem Kontext.
Hinzu kommt ein praktisches Problem: Klinische Prüfungen für chirurgische Roboter sind meist aufwendig – bei gleichzeitig möglicherweise niedrigen Patientenzahlen, wenn das System für Nischenindikationen vorgesehen ist.
Hier kann der digitale Zwilling einen echten Vorteil bieten: Weil robotische Systeme in der Regel vollständig digital beschrieben sind, kann Simulation Teile der Verifizierung und Validierung übernehmen und die klinische Evidenz ergänzen.
e. Software
Robotische Medizinprodukte enthalten typischerweise mehrere Software-Systeme gleichzeitig: Echtzeit-Steuerung, Bildverarbeitung, KI-Algorithmen, Benutzerschnittstelle, Sicherheitsüberwachung. Jedes einzelne System muss den Anforderungen der IEC 62304 genügen – aber die eigentliche Herausforderung liegt in der Integration und im Gesamtverhalten.
Besonders kritisch: die Update-Strategie. Wenn ein Software-Update die Steuerung betrifft, muss die Gesamtsystem-Sicherheit neu bewertet werden. Bei KI-Komponenten – insbesondere wenn diese von Zulieferern stammen – kann bereits ein Modell-Update das Verhalten des Gesamtsystems verändern.
f. Zulieferer
Robotische Systeme sind auf Zulieferer angewiesen, die über lange Zeiträume identische Komponenten in identischer Qualität, benötigter Stückzahl und akzeptabler Reaktionszeit liefern müssen. Das betrifft mechanische Komponenten, Sensorik, Aktorik – und zunehmend auch KI-Modelle, die als Zulieferkomponenten betrachtet werden müssen. Wenn ein Zulieferer sein Modell aktualisiert, ändert sich potenziell das Verhalten des Gesamtsystems.
g. Post-Market Surveillance
Die Marktüberwachung wird durch mehrere Faktoren komplexer:
- AI Act bringt zusätzliche Überwachungspflichten für KI-Komponenten. So muss der Performance-Drift bei autonomen Systemen im Feld erkannt werden.
- Software-Updates erfordern Re-Validierung des Gesamtsystems.
- Die Datenerfassung und -auswertung muss bereits in die Systemarchitektur eingebaut werden – nachträglich ist das kaum möglich.
- Üblicherweise sind viele Komponenten durch Dritthersteller zu überwachen. Dies wird erschwert, wenn diese selbst Komponenten Dritter beinhalten.
5. Praxistipps für robotische Medizinprodukte
a. In der richtigen Reihenfolge vorgehen
Wer in die medizinische Robotik einsteigt, sollte die folgenden Schritte nicht überspringen – und vor allem nicht in der falschen Reihenfolge gehen:
- Klassifizieren: Ist mein Produkt ein robotisches System? (→ Entscheidungsbaum aus Abschnitt 2). Das lässt sich gut mit dem nächsten Schritt kombinieren.
- Regulatorische Strategie festlegen: Was ist mein Produkt – oder besteht es aus mehreren Produkten? Nicht jede Komponente muss ein Medizinprodukt sein.
- Regulatorische Landschaft kartieren: Welche Regelwerke greifen? (→ Drei Welten aus Abschnitt 3)
- Normenlandschaft ableiten: Welche Normen sind für meinen spezifischen Produkttyp relevant?
- Risikomanagement als Klammer aufsetzen: Nicht als „ein Schritt unter vielen“, sondern als übergreifende Struktur, die alle weiteren Aktivitäten steuert
- Erst dann: Entwicklung starten
b. Typische Fehler vermeiden
Aus unserer Beratungserfahrung sehen wir bei Neueinsteigern häufig die folgenden Muster:
- Die Maschinenverordnung wird übersehen. Hersteller denken „Medizinprodukt = MDR“ und vergessen, dass ein Roboter gleichzeitig eine Maschine sein kann.
- Der Klassifizierungspfad wird falsch gewählt. Gerade bei Systemen mit mehreren Komponenten wird die Klassifizierung oft zu spät und zu pauschal vorgenommen.
- Industrieroboter werden als Basis für medizinische Co-Bots verwendet, ohne die Implikationen für Sicherheit, Kinematik und Sterilität zu durchdenken.
- Cybersecurity wird zu spät adressiert. Bei einem System, das physisch in einen Patienten eingreift, hat eine Sicherheitslücke andere Konsequenzen als bei einer App.
- Die klinische Bewertung wird unterschätzt. Insbesondere die Frage, wie man die Leistung eines teilautonomen Systems klinisch nachweist, wird nicht beantwortet.
- Zulieferer-Abhängigkeiten werden nicht strategisch gemanagt. Wenn der Lieferant eines Aktormoduls ausfällt, steht die gesamte Produktion still.
- Die Usability wird unterschätzt. Die Operateure verstehen nicht genau, was etwa die KI tut und was nicht. Dadurch können sie im entscheidenden Moment falsch oder zu spät reagieren.
c. Post-Market Surveillance von Anfang an mitdenken
Ein Punkt, der so wichtig ist, dass er einen eigenen Absatz verdient: Die Überwachung nach dem Inverkehrbringen ist bei robotischen Systemen anspruchsvoller als bei klassischen Medizinprodukten – und sie muss von Anfang an in die Systemarchitektur eingebaut werden. Wer erst nach der Markteinführung darüber nachdenkt, wie man Felddaten erfasst, Performance-Drifts erkennt, Software-Updates validiert einspielt oder Risiken minimiert, hat ein strukturelles Problem.
6. Fazit
Robotische Medizinprodukte sind regulatorisch anspruchsvoller als klassische Medizinprodukte – nicht, weil die einzelnen Anforderungen unlösbar wären, sondern weil mehrere Regelwerke gleichzeitig greifen und die Aktivitäten über den gesamten Lebenszyklus komplexer werden.
Die gute Nachricht: Wer die regulatorische Landschaft früh versteht und eine kluge Strategie wählt, kann die aktuellen Marktchancen nutzen.
Sprechen Sie uns an – wir helfen Ihnen, den richtigen Weg durch den Entscheidungsbaum zu finden.